The Gadget: Let’s Stop the ‘Beeping’ Noise
Gear warning systems in many airplanes are imperfect for several reasons.
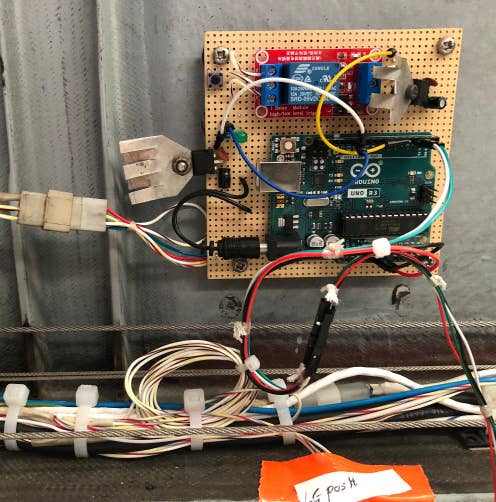
A few off-the-shelf electronic components provide the author’s homebuilt with gear-up-landing protection that he hopes he’ll never need. [Courtesy: Peter Garrison]
A few years ago, I forgot to lower my landing gear and was saved by the vigilance of a pilot holding short. After that, I began thinking about gear warning systems. My homebuilt Melmoth had none since I imagined that I would never make that mistake (or, to be more exact, never again, because I had already made it once, decades ago, in a Fournier RF-4).
The warning systems in many airplanes, for instance the Comanche 250 in which I learned to fly, consist of microswitches on the throttle and gear. They trigger a warning horn whenever the gear is up and the throttle is pulled back to idle. This is an imperfect system for several reasons. You could make a short-field approach with power, for one thing. For another, any approach to a power-off stall is accompanied by nuisance warnings.
If you're not already a subscriber, what are you waiting for? Subscribe today to get the issue as soon as it is released in either Print or Digital formats.
Subscribe Now
I toyed with the idea of using height above the ground rather than the position of the throttle as the signal of an impending landing. My first thought was to use a sonar motion detector, although, as an old friend and general-purpose adviser observed, an airplane is a rather noisy environment to begin with, and who knows how wind and engine noise might confuse a cheap sensor. At any rate, my feeble experiments were in vain. I was barely able to understand the gadget’s instructions and could never get it to trigger anything of use.
An acoustic sensor might have had another problem. The airplane would be approaching at 80 knots, or about an eighth of the speed of sound. Now, the sensor was presumably intended to detect slow-moving objects—a prowler in the garage or a visitor approaching the front door. In the time it would take sound to travel, say, 40 feet to the ground and back, the airplane would have moved forward 10 feet, and so the sensor, depending how sharply focused it was, might have left its own signal behind.
Some time after I abandoned those experiments, my memorious friend called my attention to an inexpensive—an essential attribute—lidar (light detection and ranging) sensor, which uses the out-and-return time of a laser beam to measure distance—not detect motion—with accuracy of less than a centimeter. Light did not have the delay problems of sound. In the time it would take light to travel 80 feet, the airplane would have moved about a hundred-thousandth of an inch, and so the receiver would have no trouble finding the returned signal.
The $50 Chinese lidar sensor was designed to get along with a little Italian—one world!—computer called an Arduino. The Arduino is about the size of a playing card and probably packs as much computing power as NASA had to get Apollo astronauts to the moon. But in my application all it is called upon to do is receive a signal from the lidar, decode it into a distance, and, if that is less than a certain amount—say, 40 feet—and the landing gear is not down, make an annoying noise.
- READ MORE: Recalling the Speed Rules of the Past
After a good deal of inept fumbling around—as usual, the correct solution is the simplest one, and electrical misbehavior is most likely due to faulty grounding—I got the thing working on my desk, and in due course installed it in the airplane, hidden beneath the right seat’s armrest. The lidar detector was a few inches away, in the wheel well, its glass eyes flush with the airplane’s skin.
Somewhere along the way, I realized that the system would need a press-to-test switch, whose function would be to interrupt the gear-is-down signal on the ground. I installed that on the panel beside the gear position lights. Next, I reflected that the beeping sound produced by the generic noise maker I had found at my local electronics junk store was very similar to the stall warning bleat produced by my angle-of-attack indicator. I expect to hear the stall warning just before landing, and so there was a chance that in the heat of the moment I might ignore the gear warning. To separate the stall beep from the gear beep, I modified the Arduino code to produce an intermittent rather than a continuous tone.
All now seemed ready. Having started the engine, I pressed the test button. Beep…beep…beep… Good!
- READ MORE: Dorsal Fins: Why Do Airplanes Have Them—or Not?
I took off, retracted the gear, and climbed away. Beep......beep-beep......
Something was triggering the warning, even though I was far outside the system’s 12-meter triggering range. What was it? Smog? Mediterranean fruit flies? Cosmic rays? Interference from the ignition or alternator?
As I climbed higher, the warnings became less frequent, and at 3,500 feet they had ceased entirely. But I needed to find a way to filter out the spurious beeps. I thought of two approaches. One involved the signal strength, which the sensor reported along with a distance. If the strength is below a certain minimum value, the distance measurement should be ignored. The other exploited time. On the theory that whatever was triggering the stray beeps was momentary, I added a delay to the code. If the sensor got a positive signal, it would wait a tenth of a second and try again. Only if the signal were still valid would it then trigger the warning.
A few days later, I loaded the modified code into the Arduino and took Melmoth up again. One or the other, or perhaps both, of the filters worked. The stray beeps had disappeared. The only remaining question was whether for some reason—I could not imagine what that would be—the system would not work in motion. On final approach I held down the push-to-test button, interrupting the down-and-locked signal from the landing gear. At 40 feet, beep…beep...
So far, I have spent about $100 on this gadget. The seductive thing about electronics, and this tiny computer in particular, is that it is capable of so much more, and at so little cost. For an additional $3, I could have a digital display of height above the ground—useful for those Walter Mitty moments when the only hope of all on board is a zero-zero landing. For a few dollars more, a synthesized voice could intone, “Put the gear down, you idiot!”
Will I ever need it? (I mean the gear warning, not the zero-zero landing.)
After my close call, I had already implemented a primitive remedy appropriate to my decidedly analog, steam gauge-equipped airplane—a paper prelanding checklist taped to the panel. The advice to check gear down appears three times, in capital letters. It has served me well so far. But wait—what if I forget to look at the checklist?
Then the Arduino, its tiny synapses tirelessly sparkling as I doze, will come to my rescue.
This column first appeared in the February Issue 955 of the FLYING print edition.







Sign-up for newsletters & special offers!
Get the latest FLYING stories & special offers delivered directly to your inbox